
- 4753
- ۱۳۹۴/۱۲/۲۱ - ۰۷:۳۱
- 573 بازدید
سنسورهای موقعیت مفاصل : رایجترین نوع این سنسورها کدگشاها (Encoders) هستند که هم از قدرت بالای تبادل اطلاعات با کامپیوتربرخوردارند . و هم اینکه ساده دقیق مورد اعتماد و نویز ناپذیرند این دسته انکدرهارا به دو دسته میتوان تقسیم کرد: انکدرهای مطلق: در این کدگشا ها موقعیتبه کد باینری یا کد خاکستریBCD Binary Codded Decibleتبدیل میشود. این انکدرها بهعلت سنگینی و گرانقیمت بودن و اینکه سیگنالهای زیادی را برای ارسال اطلاعات نیازدارند . کاربرد وسیعی ندارند[…]
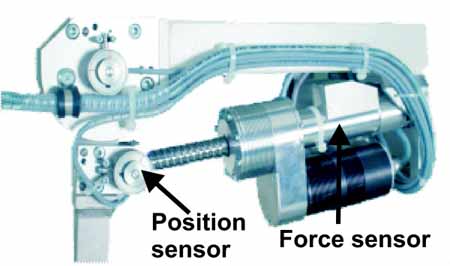
سنسورهای موقعیت مفاصل : رایجترین نوع این سنسورها کدگشاها (Encoders) هستند که هم از قدرت بالای تبادل اطلاعات با کامپیوتربرخوردارند .
و هم اینکه ساده دقیق مورد اعتماد و نویز ناپذیرند این دسته انکدرهارا به دو دسته میتوان
تقسیم کرد:
انکدرهای مطلق: در این کدگشا ها موقعیتبه کد باینری یا کد خاکستریBCD Binary Codded Decibleتبدیل میشود. این انکدرها بهعلت سنگینی و گرانقیمت بودن و اینکه سیگنالهای زیادی را برای ارسال اطلاعات نیازدارند .
کاربرد وسیعی ندارند همانطور که میدانیم بهکار گیری تعداد زیادی سیگنالدرصد خطای کار را افزایش میدهد و این اصلا مطلوب نیست.
پس از این انکدرها فقط درمواردی که مطلق بودن مکانها برای ما خیلی مهم است و مشکلی هم از احاظ بار فابلتحمل ربات متوجه ما نباشد، استفاده میشود.

انکدرهای افزاینده : اینکدگشا ها دارای قطار پالس و یک پالس مرجع که برای کالیبره کردن بکار میرود هستند از روی شمارش قطارهای پالس نسبت به نقطه مرجع به موقعیت مورد نظر دست مییابند.
ازروی فرکانس (عرض پالسها) میتوان به سرعت چرخش و از روی محاسبه تغییرات فرکانس درواحد زمان (تغییرات عرض پالس) به شتاب حرکت دوارنی پی برد.
حتی میتوان جهت چرخش رانیز فهمید. فرض کنید سیگنالهایA وB وC سه سیگنالی باشند که از کدگشا به کنترلکننده ارسال میشود. B سیگنالی است که با یک چهارم پریود تاخیر نسبت بهA. ازروی اختلاف فاز بین این دو میتوان به جهت چرخش پی برد.