
- 2799
- ۱۳۹۴/۰۹/۲۶ - ۰۹:۳۰
- 1,366 بازدید
کنترل کننده های PID در اوایل قرن بیستم در صنایع کشتیرانی مورد استفاده قرار گرفتند امروزه این نوع کنترل کننده ها در بسیاری از ماشین آلات صنعتی و غیر صنعتی کاربرد دارند . عموما ۳ روش برای کنترل دستگاه ها استفاده می شود : ۱-ON/OFF ۲- کنترل PID ۳ – کنترل مکانیکی در بیش از ۸۵% کنترلرهای دینامیکی ، از گونه های مختلف PID استفاده شده است . کلمه PID مخفف کلمه های RROPORTIONAL – INTEGRAL –[…]
کنترل کننده های PID در اوایل قرن بیستم در صنایع کشتیرانی مورد استفاده قرار گرفتند امروزه این نوع کنترل کننده ها در بسیاری از ماشین آلات صنعتی و غیر صنعتی کاربرد دارند .
عموما ۳ روش برای کنترل دستگاه ها استفاده می شود :
۱-ON/OFF
۲- کنترل PID
۳ – کنترل مکانیکی
در بیش از ۸۵% کنترلرهای دینامیکی ، از گونه های مختلف PID استفاده شده است .
کلمه PID مخفف کلمه های RROPORTIONAL – INTEGRAL – DIFFRENTIAL ( مشتق گیر – انتگرالی – متناسبی ) می باشد . هر کدام از این موارد در الگوریتم های کنترلی دارای خواص مشخص میباشد و هر کدام با اهداف معین مورد استفاده قرار می گیرند .
در برخی از موارد ، بعضی از خواص هر بخش بدلیل عدم کارایی ،در طراحی کنترلرها مورد استفاده قرار نمی گیرند.
با استفاده از ۳ مورد بالا می توانیم ۳ نوع کنترل کنندهPI , PD یا فقط P را طراحی کنیم . از کنترلرهای ID بسیار کم استفاده می شود در شکل زیر یک نمونه از الگوریتم PID را مشاهده می کنید :
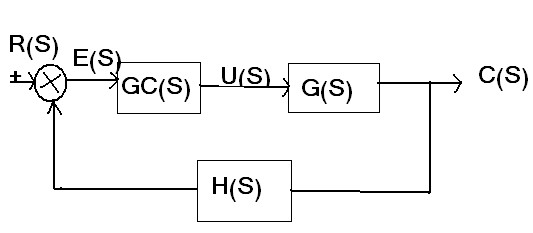
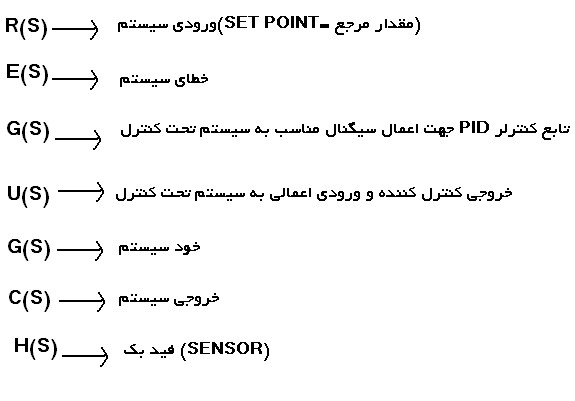
همانطور که مشاهده می شود ابتدا از خروجی سیستم فید بک گرفته می شود . این مقدار وارد مقایسه گرشده و با SET POINT (یا ورودی ) مقایسه می شود. خطای حاصل از این مقایسه به عنوان ( e(t وارد تابع کنترل PID می شود .
و با اعمال ضرایب P , I و D در خروجی کنترل کننده دارای یک سیگنال جهت ورود به سیستم تحت کنترل و در جهت بهبود آن ، می باشیم . این سیگنال باعث تغییر رفتار سیستم می شود و خروجی را به مقدار مطلوب نزدیک و نزدیکتر می کند تا با آن برابری کند .
از لحاظ خصوصیات کنترلرهای کنترلی PID دارای ویژگی های زیر می باشند :
کنترلر تناسبی: (Proportional)
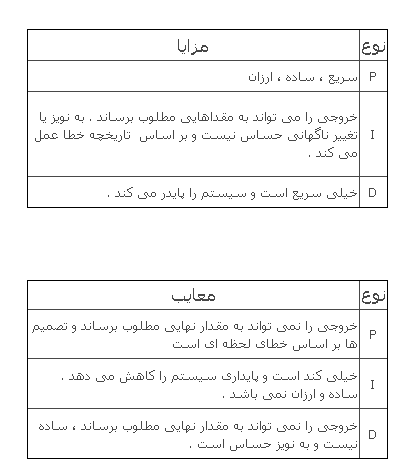
در این نوع کنترلر بین خروجی و ورودی یک نسبت مستقیم وجود دارد با یک ضریب مشخص که آنراگین یا بهره کنترل کننده می نامند.
سیگنال خطا *Kp = خروجی
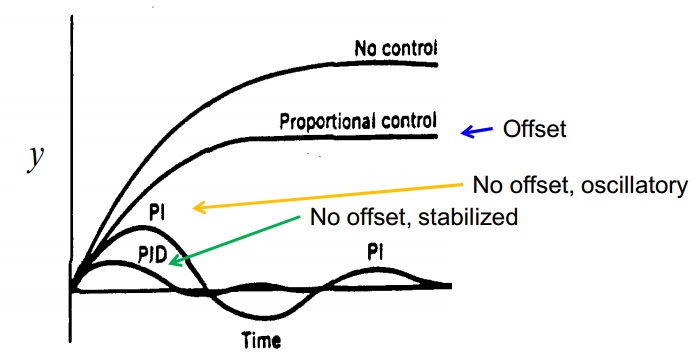
البته کنترلر تناسبی به تنهایی کافی نیست . زیرا وقتی خروجی سیستم بسمت مقدار مطلوب پیش می رود، خطا کاهش یافته و در نتیجه خروجی کنترلی نیز کم می گردد.
بنابراین همواره یک خطای ماندگار بین مقدار مطلوب و خروجی واقعی وجود دارد.
این خطا را می توان با افزایش بهره کنترل کننده کاهش داد اما باعث ناپایداری سیستم و نوسان خروجی می شود. برای حل این مشکلات معمولا کنترلر تناسبی را همراه کنترلرهای مشتق و انتگرال بکار می برند.
کنترلر انتگرالی(Integral) :
همانطور که از نامش پیداست بین ورودی و خروجی یک رابطه انتگرالی برقرار است
این کنترلر برای جبران خطای ماندگار به کار می رود، زیرا تا وقتی که خطایی در خروجی وجود داشته باشد، جمله انتگرال تغییر پیدا می کند و در نتیجه خطای خروجی رفته رفته کاهش می یابد.
کنترلر تناسبی – انتگرالی (PI):
کنترلر PIترکیبی از کنترلر انتگرالی و تناسبی است که به صورت موازی بهم وصل شده اند. این کنترلر اگر بطور صحیح طراحی شود مزایای هر دو نوع کنترل انتگرالی و تناسبی را خواهد داشت . پایداری ، سرعت و نداشتن خطای حالت ماندگار از ویژگیهای این کنترلر است.
کنترلر تناسبی – مشتق گیر(PD) :
کنترلر PD از ترکیب موازی دو نوع کنترلر مشتق گیر و انتگرالی ایجاد می شود.
کنترلر مشتق گیر دارای این مشخصه است که خود را سریعا با تغییرات ورودی هماهنگ می کنند
لذا در مواردی که پاسخ سریع خروجی مد نظر است می توان از این نوع کنترلر ها استفاده کرد اما از انحایی که عمل مشتق گیری باعث تقویت نویزهای موجود در محیط پروسه می شوند و به علاوه مشتق گیرها تنها نسبت به تغییرات ورودی حساسیت نشان می دهند .
بنابراین مشتق گیرها به تنهایی مورد استفاده قرار نمی گیرند بلکه هرگاه نیاز به خاصیت مشتق گیری در یک پروسه باشد .
کنترلر آن را به صورت مشتق گیر- تناسبی یا مشتق گیر- انتگرالی یا مشتق گیر- تناسبی – انتگرالی می سازند.
کنترلر PID :
این نوع کنترلر از ترکیب موازی سه کنترلر تناسبی ، انتگرالی و مشتق گیر ایجاد می شود و متداولترین نوع کنترلر در صنایع می باشد.
مهم ترین بخش در کنترل فرآیندهای PID بدست آوردن ضرایب آن می باشد . روش زیکلر نیکولز یک روش تجربی برای بدست آوردن ضرایت PID می باشد که به دو صورت حلقه بسته (CLOSE LOOP) و حلقه باز (OPEN LOOP) مورد استفاده قرار می گیرند .
در روش حلقه باز به این صورت عمل می شود که ابتدا باید فید بک را از مدار باز کرد تا مدار به یک حلقه با تبدیل شود .
سپس ورودی پله را به مدار اعمال می کنیم و پارامترهای مدلسازی را اندازه گیری می کنیم . در پایان از طریق جدول زیر پارامترهای کنترلی را انتخاب می کنیم .